
")
")
")
")
")
")
")
")
")
")

Sunday 21 March 2021
Monday 3 August 2015
Bedini Motor ?

Admittedly, Roger Andrews had failed to appreciate the subtle potential for his motor to tap into the wealth of 'Zero Point Radiant Energy’ nor its potential for desulphating batteries !
Again John Bedini claims that his techniques associated with lead acid battery maintenance to be novel but sadly those go back many more years than his so called motor.
Battery desulphation principles and techniques are as old as the lead acid battery itself. Google searches through patent archives reveal hundreds of patents relating to high voltage pulse techniques as far back as 1933 by the US Army and there are papers referring to the beneficial effects of high voltage pulse charging lead acid batteries going back to 1915 ! None of the patents claim a reliance on the wonders of 'Zero Point Radiant Energy’ nor to the discoveries of Tesla.
It is so sad to see the dogged determination of so many in their desires to believe a falsehood. Trawling through You Tube videos reveals the staggering efforts by so many and their substantial commitment and expenditure.
Roger Andrews patented a toy motor that relied on extremely simple circuitry. He developed it as a example of a fun and enjoyable scientific curiosity that might stimulate interest.
It is clear that his circuit continues to create substantial interest.

Bedini Motor (14 Feet) - 16 Capsules

London Eye (443 Feet) - 32 Capsules
Tuesday 28 July 2015
5 Years And A Few Days ...

Again, after 5 years, another product that runs 24/7 and relies on no more than low ambient lighting and spins the rotor at speeds that exceed 30,000 rpm (It can run at 10,000 rpm by the light from a match or a candle.)
The motor is housed in a laser cut walnut case 115 x 55 x 8 mm. (This prototype is awaiting a toughened glass rotor support.)
This design will NOT be available as a commercial product nor will circuit details be published. The motor uses microprocessor power management / speed control.
Power consumption is extremely low; the solar cells deliver about 1V and the motor uses a few microwatts – probably the same as a watch.
The device is NOT over-unity nor is it truly perpetual – but it has run for a year now on a dark shelf in my sitting room and I expect it to run for very many more.
The point and purpose ? None ! The search for over-unity technology is a hopeless and futile task but to create something that will run forever on a shelf as a curiosity is certainly the challenge !
These motors are fun, they work and they cost little (except time) but they will never, ever create energy - so start enjoying them for what they are and leave John Bedini and others to work with their magic radiant energy and lead acid battery charging !
There is no 'free energy', no 'radiant energy' and all the others myths talked of by people like John Bedini - there is a world of research that is free to everyone of us - step by step, each one of us can learn, explore and maybe discover future solutions to the world's problems - it begins with teaching, understanding and scientific facts - NOT fiction !
Saturday 18 July 2015
5 Years Later ...

Finally, after 5 years, a product that runs 24/7 and relies on no more than low ambient lighting yet spins a selection of rotors at speeds that can exceed 20,000 rpm. (It can run at 6,000 rpm by the light from a match or a candle.)
The motor is housed in a laser cut mahogany case 60 x 50 x 8 mm.
This design will NOT be available as a commercial product nor will circuit details be published. The motor uses microprocessor power management / speed control.
Power consumption is extremely low; the solar cells deliver about 1V and the motor uses a few microwatts – probably the same as a watch.
The device is NOT over-unity nor is it truly perpetual – but it has run for a year now on a dark shelf in my sitting room and I expect it to run for very many more.
The point and purpose ? None ! The search for over-unity technology is a hopeless and futile task but to create something that will run forever on a shelf as a curiosity is certainly the challenge !
These motors are fun, they work and they cost little (except time) but they will never, ever create energy - so start enjoying them for what they are and leave John Bedini and others to work with their magic radiant energy and lead acid battery charging !
Friday 2 July 2010
Bedini Motor - Clarification
If, like so many, you believe that the Bedini SSG is an over-unity device then it is not. John Bedini has emphasized this very point on many occasions. (We too were confused by the diversity of claims in this regard !)
We came across the following extract from an article on how to construct a Bedini SSG and it makes it very clear what it actually is :
A GUIDE FOR BUILDING
BEDINI ENERGIZERS
BY
RICK FRIEDRICH, RICHARD L., AND RS
It must be emphasized that the Bedini Trifilar SG or SSG are not over‑unity (OU) systems. They are only one-to-one energy shuttle systems. They use one charged input battery to charge 4 or more output batteries. When set up properly, one pays for 1 and one gets the input back and three or more others for free.
The energizers are never going to show OU themselves...!!! The OU shows up in the batteries energy capacity. They last longer and take less time to charge - until they get to the point of getting 4 or more charges for the price of one!! The sooner EVERYONE understands that, the better.
This important fact needs to be understood by anyone embarking on this project. The expectation that it (the energizer) is an over-unity device has led to some misunderstandings previously.
John B. designed the Trifilar SG with the Capacitor Pulser and SSG variants as ‘proof of concept’ to demonstrate and prove his method of capturing radiant energy and get the world to understand that it is the high potential, almost currentless pulses that the different variations of energizer put out, that causes what happens within the charged batteries.
This is very important. This is where the radiant energy manifests itself, and what ‘conditions’ the batteries.
The process that occurs in these batteries is referred to as conditioning. Once conditioned, the batteries last longer and take less time to charge, etc... Other benefits are that they will not wear out by sulfate buildup that usually occurs with standard DC charged batteries. They do not suffer from the depletion of water by evaporation from heat, generated by the charging process the way conventionally charged batteries do.
So again we reiterate that the Bedini Motor is not an over-unity device - it is in fact a mechanical lead-acid battery desulphator ! It does not violate any laws of physics - in our opinion it does violate several other laws including commonsense and it can seriously damage your bank balance ! (Ref. : Desulphators)
Monday 28 June 2010
Measurement Errors
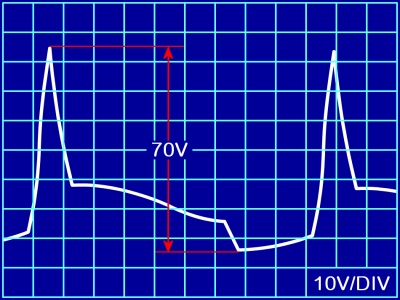
The above waveform illustrates the fundamental problem facing every Bedini Motor experimenter who needs to measure the extracted BEMF power. The waveform is a representation of the transistor collector voltage.
If a `simple / cheap´ digital meter is used to measure the voltage, such as our unbranded NC72CG, it will measure, not the average but somewhere around the peak voltage - maybe 60 volts or more. Whereas, an analogue voltmeter, like the AVO 8, will read around 15-20 volts; not because of any inbuilt averaging function but purely because of the ballistic response of the meter movement.
Which is correct ? It depends on the definition of voltage in this case. The peak voltage is 70 volts, so our cheap meter displays a more accurate estimate of peak volts than the AVO 8.
For the battery charging enthusiasts, the ultimate question is “How much power is available ?”. Hence neither meter is capable of displaying a correct value of average voltage to permit us to measure power. Even if we could measure the average voltage by integrating the waveform, there remains another measurement - the current. Again, the same problems exist; we need the average current measurement. And another significant problem is that of the phase relationship between the voltage and current - we can not assume that Watts = Volts * Amps (even p = v * i * cos(Φ) is a gross oversimplification - Ref. : Power Factor).
In some respects, John Bedini´s approach might be considered correct. One way to determine power output is to accumulate the power in some form of storage device. The choice of a lead acid battery for this purpose seems to be a particularly bad one !
Why choose such a complex storage device ? It is well known that a lead acid battery will react to high voltage pulses and there are so many other electrical, chemical, thermal and mechanical variables and complexities associated with all batteries that only serve to confuse and dumbfound everyone.
(You can´t measure urine volume by pissing in the ocean and measuring the rise in sea level ! You can if you piss in a pot !)
As some have already tried, a capacitor can provide a much more reliable reference - we can determine the charge of a capacitor and, knowing the charge time, we can approximate power. (Care must be taken not to exceed the capacitor´s peak voltage rating.)
 The real solution to determining power availability in these situations is to heat up a resistor and measure its temperature. Such measurement instruments are based on calibrated thermocouples - often simply referred to as `true RMS voltmeters or powermeters´. Agilent Technologies (ex-Hewlett Packard) have a range of such meters - not cheap but well worth `borrowing´ if possible.
The real solution to determining power availability in these situations is to heat up a resistor and measure its temperature. Such measurement instruments are based on calibrated thermocouples - often simply referred to as `true RMS voltmeters or powermeters´. Agilent Technologies (ex-Hewlett Packard) have a range of such meters - not cheap but well worth `borrowing´ if possible.
So, again we make this plea; understand your measurement principles and limitations of your instruments. Seek out the `real truth´ - John Bedini should be able to acquire a calibrated power meter - let him prove and substantiate his claims without the unnecessary encumbrance of lead acid batteries ! At the moment, this is clearly not science - it´s more akin to a magician´s act - elaborate sleight of hand is deceiving everyone !
There are an almost infinite selection of measurement error examples from Bedini Motor related sources : (What do you think ?)
Input of 12 volts DC at .08 amps has a watt value of .96
Output of 315.9 volts DC was connected in series through a 32,600 ohm ( Measured) resistor as a load. The end result is a watt value of 3.06.
Sadly all that we have is a gross simplification founded on measurement errors by a dedicated and enthusiastic experimeter who has been given a false belief and a false expectation.
It is obvious that, if 3 watts of power was being dissipated, then the resistor would be hot ! On other sites, the lack of heating of resistors or batteries has been conveniently explained to be due to the strange and beneficial characteristic of `radiant energy´ ... nothing gets hot - maybe that’s because there’s no power !
Here is another example of nonsense measurements - this time by John Bedini (Ref. : Mechanical Monopole Oscillator) :
Voltage across charging battery was 12.56
Amperes measured going to the battery was 38ma
Watts = V * A = 0.48 W or 477 milliwatts
As has already been shown, a simple multimeter will tend to read the peak voltage / current. In John´s example, the current might peak at 38mA but the average current will be substantially less (Looking at the waveform, the average current might be lower than a hundredth of that of the peak.)
John Bedini concludes :
“When the machine is properly built and tuned, by measuring with conventional meters we will see more energy leaving the receiving battery via a constant load than entered it.”
“The first principle is that you must not fool yourself and you are the easiest person to fool.”
Richard P. Feynman (1918–1988)
We enjoy these motors and so should the rest of humanity. Why ? Because they’re fun and there’s so much scope for creative talent and fundamental learning. What makes us angry and upset is that the perpetrators of this myth are held up to the world as the scientific innovators of the future and dare to associate their names with the true geniuses such as Guass, Faraday, Lenz, Maxwell and Tesla.
The consequence of their actions has incurred a significant expenditure in time, effort, thought and money by so many.
Governments pass legislature to prevent us falling foul of ‘too good to be true’ financial investments the same should hold true for this type of nonsense … education, good judgment and a healthy dose of scepticism are the best defenses against becoming a victim. Remember, if it looks too good to be true, it probably is, even if it is on the internet !
We close this entry with a quotation :
There is NO free electricity produced in these systems, or any other system that I know of. I have stated this repeatedly. The only thing these systems produce are a series of “high voltage spikes” that have no current associated with them. Voltage without current is the nature of Radiant Energy. This is what Tesla said. I call this “reactive power” because it does not represent voltage and current simultaneously, that could be measured as WATTS. This Radiant Reactive power WILL charge batteries, light light‑bulbs and other things but it DOES NOT meter as REAL POWER. This is why your math is useless !
So please, quit quoting your theories and analyses to me. My light‑bulbs are on. Are yours ? You are welcome to believe in your theory, but I KNOW that Tesla was right about the nature of electricity, and how to successfully tap its useful fractions. If you would just build the motor the way I have said, you could begin to learn about this too.
Beyond this, I am done CHATTING with you. Leave the people alone who are trying to learn this. Your ignorant comments are of no use. That’s as nice as I can be about it.
John Bedini
It seems that John Bedini is clearly saying that his motors do not produce surplus electricity - just high-voltage pulses with little current or power. And all that it’s good for is desulphating batteries !The motor is no more than the magician’s distraction ... is it possible that the `real magic´ takes place within the chemistry of a lead acid battery and its reaction to high voltage pulses ? Does it seem probable that `Radiant Energy´ can not be proven to exist, measured and quantified until it has been processed within a car battery ? Sounds more like `Hocus Pocus´ than science !
We leave the debate and conjecture to others ...
Tuesday 22 June 2010
Low Power
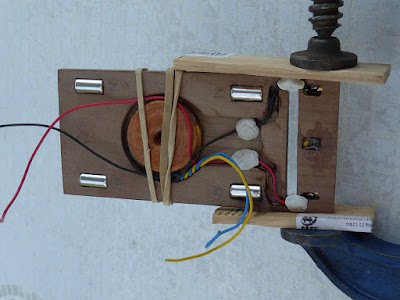
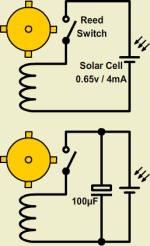 Working at the extremes of very low power provides a greater understanding and appreciation of all aspects of this type of pulse motor design. Our definitive benchmark in low power consumption is based on the circuit on the right.
Working at the extremes of very low power provides a greater understanding and appreciation of all aspects of this type of pulse motor design. Our definitive benchmark in low power consumption is based on the circuit on the right.
These circuits place no reliance on semiconductors; other than the solar panel. The trigger is a simple reed switch which requires no power to operate other than an infinitesimally small force to close.
Solar cell specifications look good on paper – 0.65V at 4mA. But indoors, under ‘normal’ lighting it’s more like 0.2V at 100µA ! Pointing a 60W light bulb at it produces some improvement – only in full sunlight is the promised power delivered !
Using a magnetically levitated rotor, the first circuit worked but it required the close presence of a 60W light source; maybe only to be expected with barely 0.3V at 1.5mA available. The rotor ‘chugged’ along, hesitantly, at a sluggish 100 RPM.
Adding the 100µF capacitor changed the performance dramatically. The rotor sprang into life accelerating up to a healthy 2,000 RPM. Even with the 60W light source removed, it continued to produce around 200 RPM !
Why did the capacitor produce such a performance improvement ? Nope – not ‘radiant energy’ ! The answer is that it created an energy reservoir for the solar cell. For 80% of the time the solar cell’s power was not being used. Only when the reed switch closed was there a demand for power – and there was hardly any to be had from the tiny solar cell. But, by adding the capacitor, it allowed a charge to accumulate until the next trigger.
(This is technique called ‘burst’ supply – power is delivered in pulses rather than continuous; we use this approach in our designs to cater for situations when power availability becomes very low.)
With a lot of effort to optimize the reed switch location, we successfully got the motor to run from the lowest power levels yet achieved – the motor operated at 200 RPM using 0.15V at 500µA (75µW).
Silicon based semiconductors do not work at such voltage levels. They need a minimum of 0.65V to operate. No work has been done using germanium devices. They are considered to be archaic and are becoming obsolete; but they work down to 0.25V.
The reed switch is hard to beat. They’re cheap and you can replicate similar motors for the cost of a reed switch, a bobbin of copper wire, a few magnets and a ‘borrowed’ solar panel using a garden solar lamp – or just use an old 1.5V battery.
In our implementation, using a 1.5V battery, we reached speeds where magnets were being thrown off the rotor !
To date, we’ve not bettered the reed switch performance – we did toy with the idea of forgetting all the electronic design; to go with a product that used something that was so simple. But there are a few problems with reed switches. To get the extremes of performance, the switch position and rotor geometry was critical. The other point is that a reed switch ultimately will fail through metal fatigue. The best estimates are 109 operations before failure – this sounds a lot but for a rotor using 2 magnets, spinning at 10,000 RPM 24/7 means that the reed switch might fail in less than a year.
Reed switches have a much reduced lifespan when high currents are involved. For those, making ‘bigger’ motors, this can be remedied using a power transistor that is driven by the reed switch.
Our test results from the above circuits are detailed below. We used three multimeters, an old analog AVO 8, Fluke 85 and a very cheap digital meter whose origin is unknown - model no. N72CG.
These results show the problems associated with measurement of pulse driven systems. Using solar cells exaggerates the problem - unless drawing a relatively high current, battery voltage will remain constant - a solar cell does not !
| Solar Cell | O/C Voltage | S/C Current |
| AVO 8 | 0.35 | 1.35mA |
| Fluke 85 | 0.35 | 1.38mA |
| N72CG | 0.35 | 1.41mA |
| Motor (no capacitor) | Motor (100µF capacitor) | |||
| Volts | Current | Volts | Current | |
| AVO 8 | 0.15 | 1.10mA | 0.15 | 1.00mA |
| Fluke 85 | 0.58 | 1.85mA | 0.15 | 1.00mA |
| N72CG | No reading | No reading | 0.24 | 3.35mA |
From examination of the above test results, it is clear that the AVO 8 provides the most consistant figures. We presume this to be due to the averaging effect of the meter ballistics. Both digital meters appear to display the peak transient levels rather than an average value. (In fact the cheap meter could not cope with the pulse nature of the first motor and displayed random numbers !)
If we had extrapolated these measurements, it is clear that we could be led to believe and substantiate evidence to show that `extra´ energy was being created.
Again we highlight the danger of interpretation of measurements from test instruments. In our experience, digital meters tend to measure peak transients ... and that then leads to conclusions that make no sense ... and permits us all to enter the strange world of `free energy´ !
(We had intended to discuss ‘Energy Harvesting’ and DC-DC Charge Pumps but that subject will be covered later.)
Subscribe to:
Posts (Atom)